हमें अपने व्यवसाय पर भरोसा क्यों है?
हम पैनिक को खरीद से बाहर करते हैं। हम अपने विश्वसनीय स्रोतों से लाखों-से-मुश्किल भागों का स्टॉक करते हैं। हम अपनी उत्पाद सूची को मिनटों तक ताज़ा करते हैं, और ऑनलाइन खरीदारी वास्तविक समय में पूरी होती है और हर दिन भेज दी जाती है।
2002 में स्थापित, MFGChips इलेक्ट्रॉनिक घटकों के वितरण में एक स्थानीय नेता है, और आज स्थानीय बाजार में सबसे सम्मानित और अभिनव कंपनियों में से एक के रूप में भी मान्यता प्राप्त है। हांगकांग में मुख्यालय, MFGChips ने उत्कृष्ट सेवा प्रदान करने और कुशल, व्यापक वैश्विक आपूर्ति श्रृंखला समाधान प्रदान करने के लिए एक प्रभावशाली प्रतिष्ठा अर्जित की है।
और अधिक जानें >
डीसी मोटर गति और दिशा नियंत्रण के लिए लैपटॉप-आधारित एचएमआई
डीसी मोटरों को आमतौर पर दिशा के लिए स्विच या बटन और गति के लिए एक पोटेंशियोमीटर से नियंत्रित किया जाता है।जबकि पोटेंशियोमीटर गति विनियमन के लिए प्रभावी रहता है, यह प्रणाली एक विकल्प प्रदान करती है, जो सीधे लैपटॉप के माध्यम से डीसी मोटर (36V तक) की गति और दिशा दोनों को नियंत्रित करने में सक्षम बनाती है।यह प्रोसेसिंग का उपयोग करके विकसित ग्राफिकल यूजर इंटरफेस (जीयूआई) के साथ सीरियल संचार के लिए एक Arduino Uno बोर्ड को एकीकृत करता है।(प्रसंस्करण इंटरैक्टिव ग्राफिक्स, एनिमेशन और एप्लिकेशन बनाने के लिए एक मुफ़्त, ओपन सोर्स प्रोग्रामिंग भाषा और वातावरण है।) जीयूआई एक लैपटॉप-आधारित मानव-मशीन इंटरफ़ेस (एचएमआई) के रूप में कार्य करता है, जो सुचारू, स्क्रीन-आधारित मोटर नियंत्रण प्रदान करता है।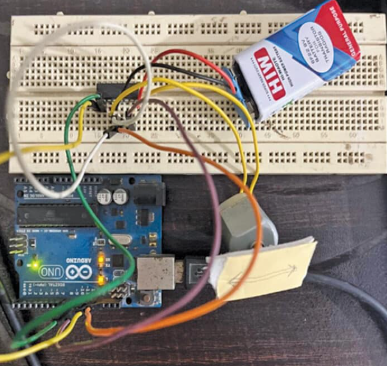
हार्डवेयर को असेंबल करने के लिए आवश्यक घटकों को बिल ऑफ मैटेरियल्स तालिका 1 में सूचीबद्ध किया गया है। सिस्टम का ब्रेडबोर्ड-आधारित लेखक का प्रोटोटाइप सर्किट और वर्किंग में दिखाया गया है।
चित्र 2 डीसी मोटर गति और दिशा नियंत्रण के लिए लैपटॉप-आधारित एचएमआई का सर्किट आरेख दिखाता है।सिस्टम को Arduino Uno बोर्ड (MOD1), L293D मोटर ड्राइवर IC (IC1), DC मोटर (M) और कुछ सहायक घटकों का उपयोग करके बनाया गया है।मोटर को Arduino के पावर स्रोत के साथ संयोजित करने के बजाय एक अलग 9V बिजली आपूर्ति का उपयोग किया जाना चाहिए।Arduino बोर्ड को एक समर्पित 9V आपूर्ति की आवश्यकता होती है।प्रोग्रामिंग के लिए USB केबल का उपयोग किया जाता है।
सिस्टम लैपटॉप GUI और Arduino बोर्ड के बीच क्रमिक संचार के माध्यम से कार्य करता है।GUI USB सीरियल पोर्ट के माध्यम से Arduino को नियंत्रण आदेश भेजता है।इन आदेशों को प्राप्त करने पर, Arduino उनकी व्याख्या करता है और L293D ड्राइवर का उपयोग करके मोटर को सक्रिय करता है।विशेष रूप से:
कमांड 0: मोटर को आगे बढ़ाता है
आदेश 1: मोटर बंद कर देता है
कमांड 2: मोटर की दिशा को उलट देता है
कमांड 3 से 255: गति नियंत्रण के लिए पीडब्लूएम मूल्यों का प्रतिनिधित्व करते हैं
सॉफ़्टवेयर
इस प्रणाली में दो कोड सेट का उपयोग किया जाता है: